In this session, I explored the basics of distance measurement using a ultrasonic sensor and automation with servo motor. This project provided a hands-on opportunity to see how sensor data can drive mechanical movement which is an essential concept in robotics and automation.
Tinkercad Simulation
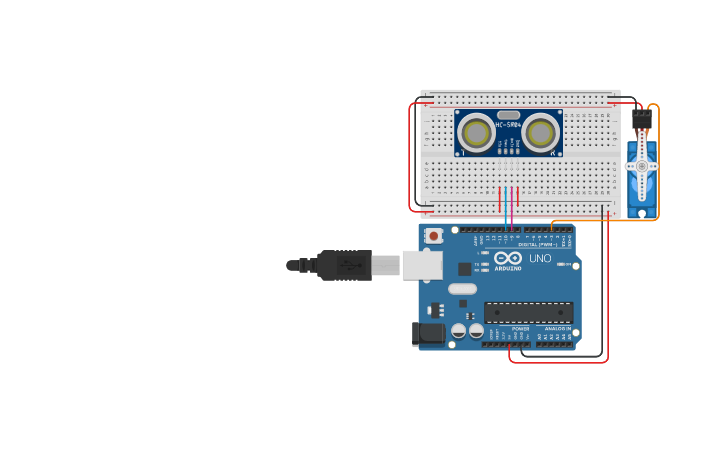
Setting Up the Ultrasonic Sensor
I began by wiring the ultrasonic sensor to the Arduino. The sensor works by emitting ultrasonic waves and measuring the time it takes for the echo to return, which gives a distance reading. Ensuring accurate and secure connections was key to obtaining reliable measurements.
Controlling the Servo Motor
Next, I connected a servo motor to the Arduino. Servos are capable of moving to a specified angle when they receive a control signal. I wrote a simple program that reads the distance from the ultrasonic sensor and then adjusts the servo’s position accordingly. This setup demonstrated how sensor feedback can be directly applied to control a motor, making the system responsive to its environment.
Output: Smart Motor Control With Ultrasonic Sensor
Key Learnings
- Sensor Accuracy: The ultrasonic sensor provided real-time distance data, crucial for applications like obstacle detection.
- Motor Control: Learning to program the servo motor highlighted the fundamentals of converting digital signals into physical motion.
- System Integration: Combining these two components showcased the interplay between sensor input and motor response.
This beginner-friendly project not only reinforced core technical skills but also paved the way for more complex explorations in embedded systems.

